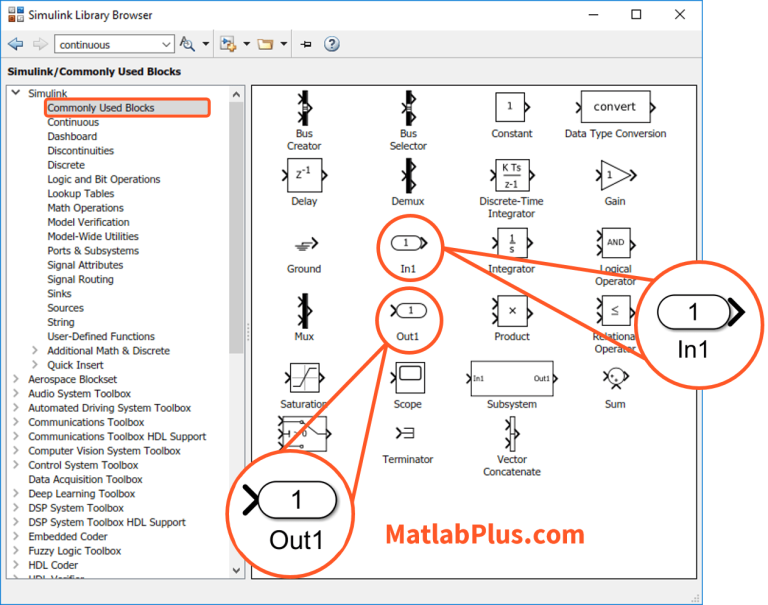
بلوک Subsystem در سیمولینک









2 Comments
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.

سلام ممنون آموزشتون عالی بود تشکر می کنم
با درود فراوان
ممنون از اینکه نظر خود را با ما به اشتراک گذاشتید، تمام تلاش ما در تیم متلبپلاس تولید محتوای آموزشی باکیفیت است.