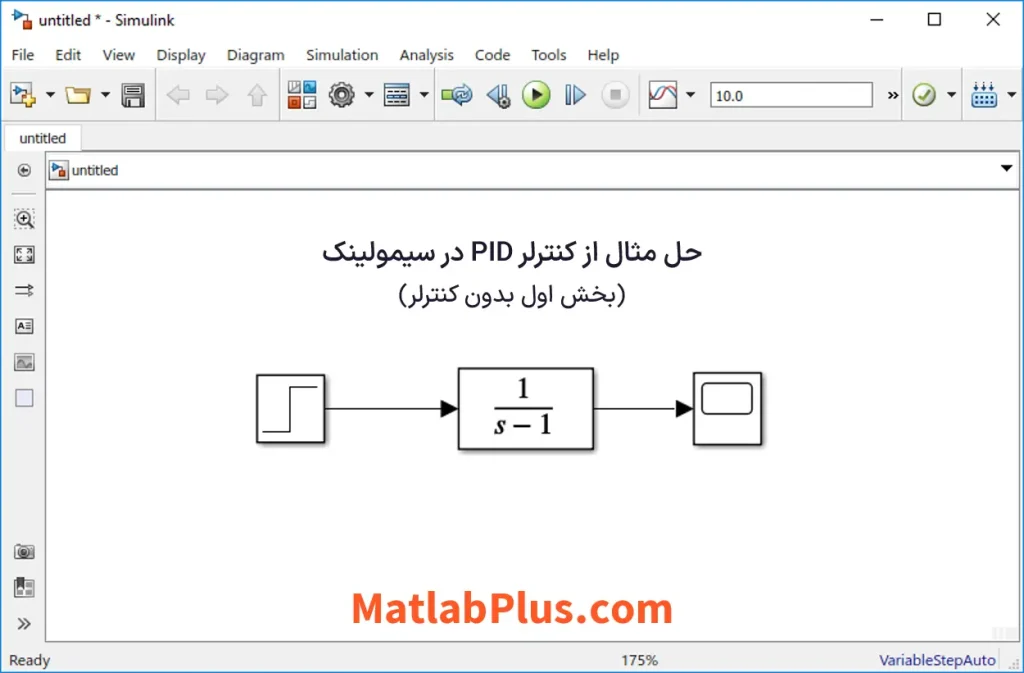
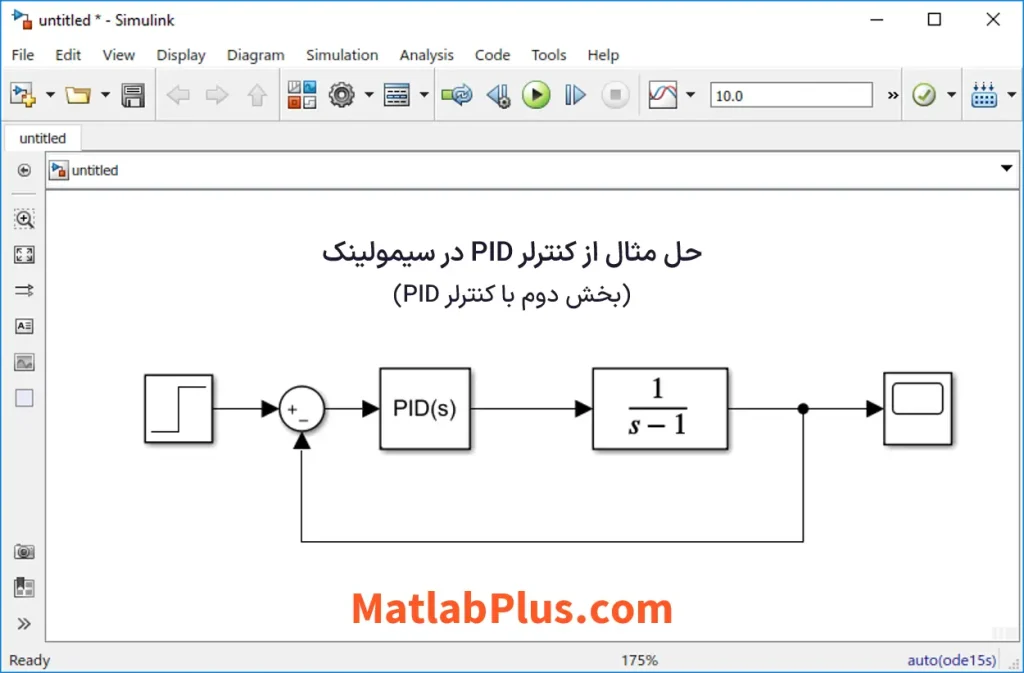
بلوک کنترل PID در سیمولینک



6 Comments
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.

سلام و وقت بخیر_ جلسات را با دقت مطالعه نمودم و بسیار هم مفید بودند
بسیار متشکرم استاد گرامی
ممنون از اینکه نظرتون رو با ما به اشتراک گذاشتید.
موفق باشید
سلام و با تشکر از زحمات شما. عالی بود.
با سلان و عرض ادب
ممنون از اینکه نظرتون رو با ما به اشتراک گذاشتید.
موفق باشید.🙏
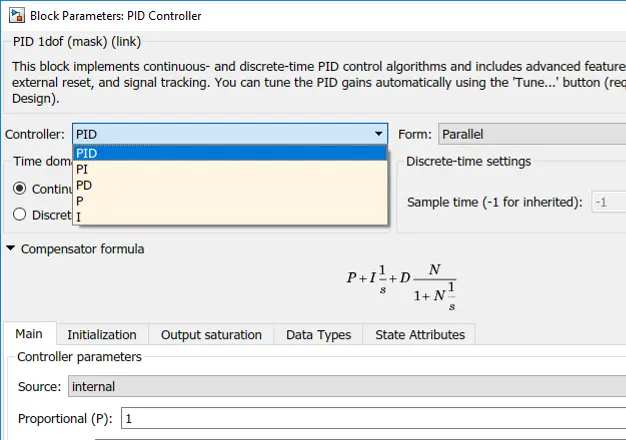
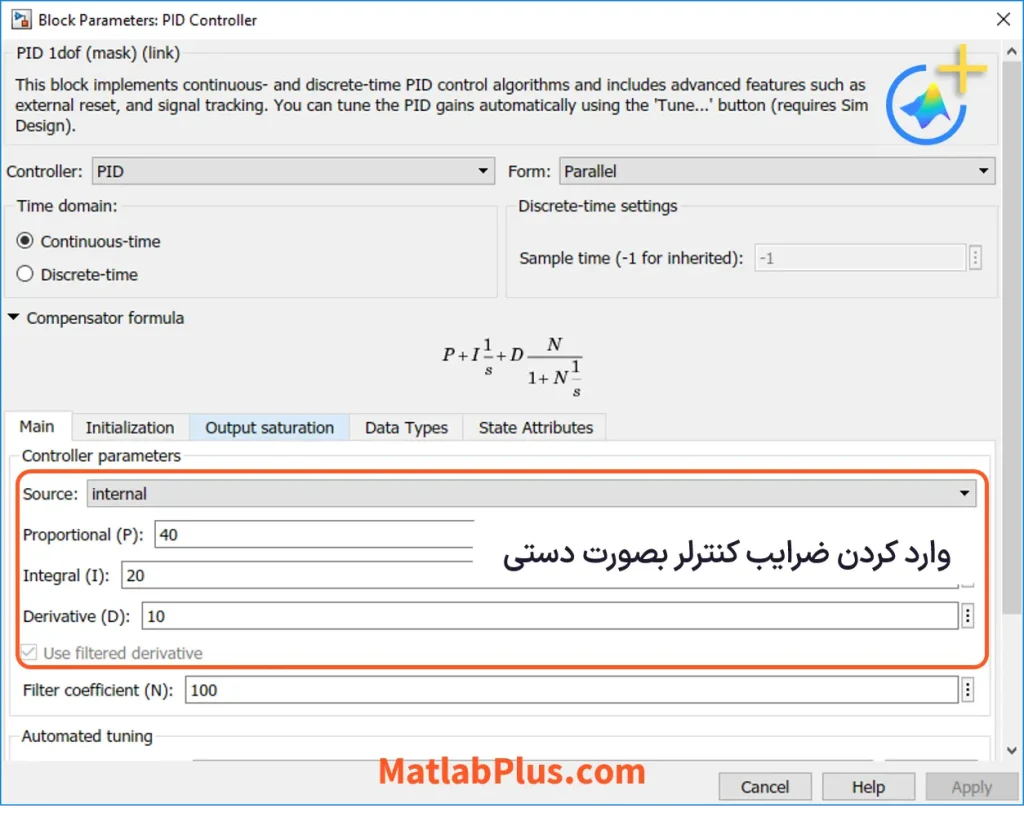
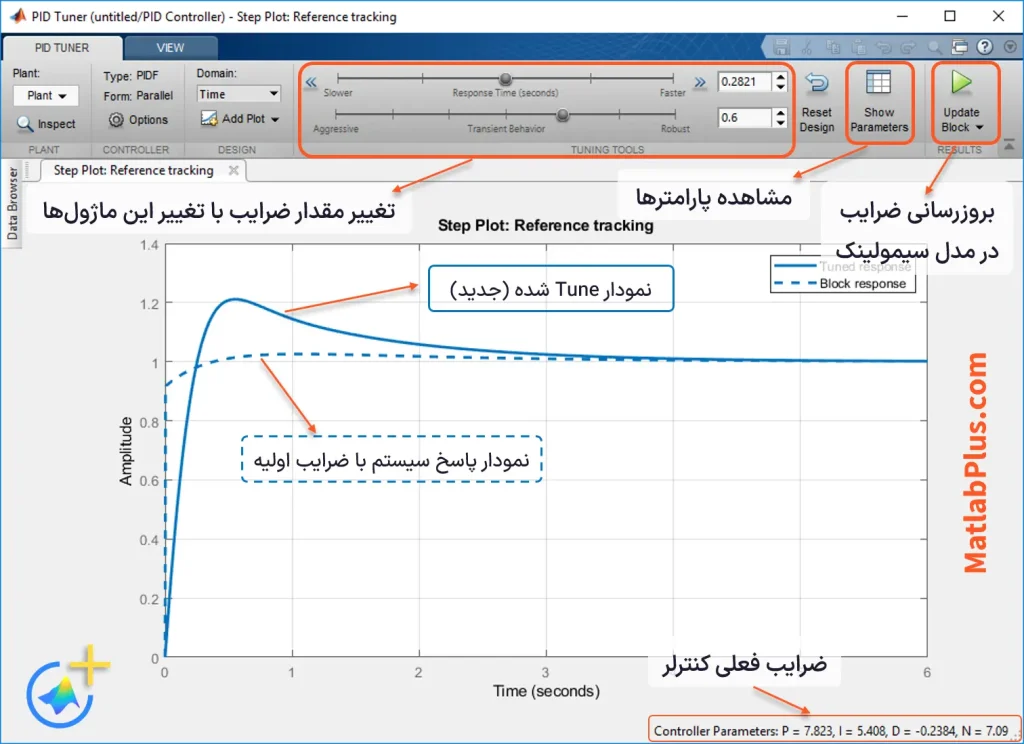
سلام…بدست اوردن ضرایب PID با ستفاده از Tuner خیلی کاربردیه ولی ضریب N که میده چی هست؟؟
آیا برای اعمال کنترلر PID از این ضریب هم استفاده میشه؟؟
سلام و عرض ادب
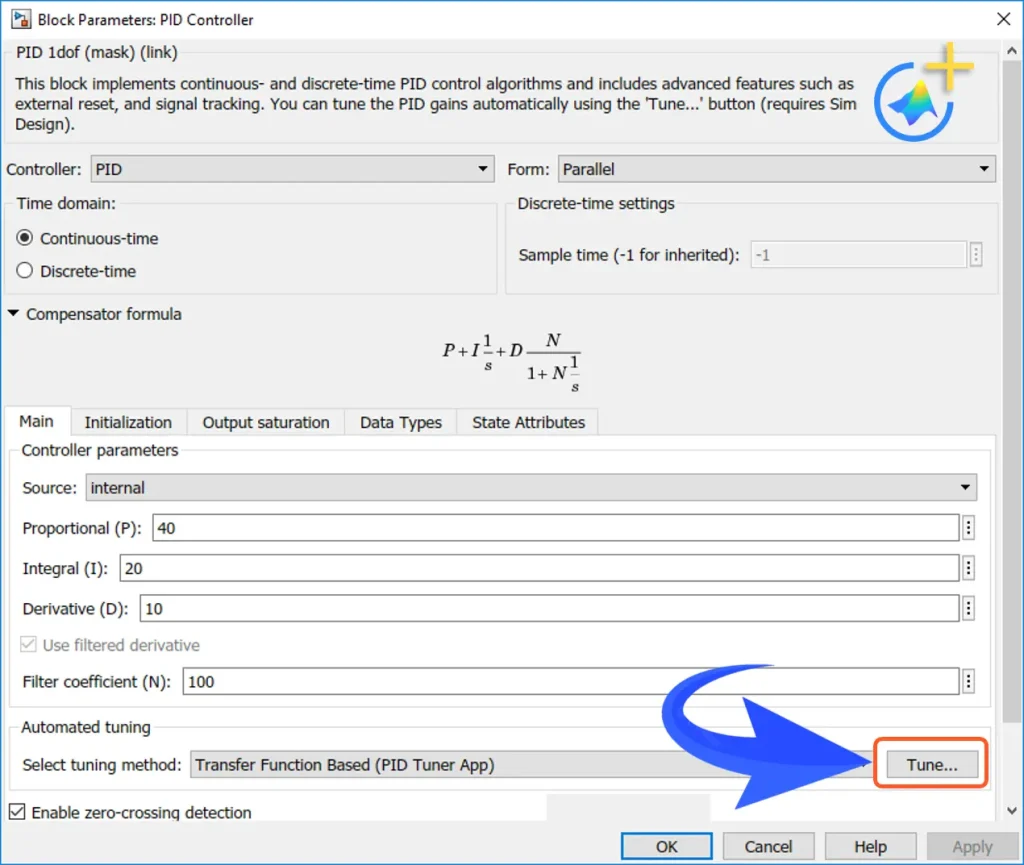
این ضریب فقط در تیونر متلب وجود داره و طبق اطلاعاتی که خود نرم افزار متلب به ما میده، N ضریب فیلتر هست و در رابطه PID هم شما میتونید نقش این ضریب رو به وضوح ببینید.
اگر به تصاویری که از محیط متلب در همین صفحه گذاشتیم دقت کنید، نام و فرمول N رو میتونید ببینید.
موفق باشید.